- Университет
- Сведения об образовательной организации
- Университет сегодня
- Структура
- Частые вопросы
- Ученый совет
- Информационно-библиотечный центр
- Факультеты и кафедры
- Пресс-центр
- Фирменный стиль (брендбук)
- Персоналии
- Персональные данные
- Медицинские услуги университета
- Ассоциация выпускников ВолгГТУ
- Центр проектной деятельности «POLYGON»
- Точка кипения
- Противодействие терроризму и экстремизму
- Противодействие коррупции
- Образование
- Учебно-методическое управление
- Высшее образование
- Образовательные стандарты
- Второе высшее
- Переподготовка и повышение квалификации
- Довузовская подготовка
- Анкета оценки качества оказания образовательных услуг
- Центр цифровых научно-образовательных проектов и разработок в сфере промышленного искусственного интеллекта
- Наука
- Управление науки и инноваций
- Диссертационные советы
- Отдел аспирантуры и докторантуры
- Научные конференции
- Периодические научные издания
- Национальные проекты России
- Инжиниринговый Центр «Полимерные композиционные материалы и технологии»
- Центр коллективного пользования «Физико-химические методы исследования»
- Центр сертификации композитных материалов ВолгГТУ
- Развитие
- Сотрудничество
- Справочник
- Абитуриенту
- Студенту
- Аспиранту
- Сотруднику
- Партнеру











Главная / Университет / Факультеты и кафедры / Факультет автоматизированных систем, транспорта и вооружений / Кафедры / Кафедра «Автоматизация производственных процессов» / Разработки / Адаптивный мобильный робототехнический комплекс
Адаптивный мобильный робототехнический комплекс
1. Сущность разработки
Мобильный робототехнический комплекс повышенной проходимости, с адаптивными движителями колесного типа позволяющие варьировать клиренс, радиус поворота, устойчивость, жесткость каркаса колеса, площадь контакта с поверхностью. Это достигается за счет использования тензометрических датчиков и микроконтроллера внутри колеса, осуществляющие обратную связь и определение факта наличия препятствия и возможность его преодоления.
2. Назначение и область применения
Мобильные робототехнические комплексы (МРК) используются в промышленных, сельскохозяйственных, морских, военных и спасательных целях. Идеи использования адаптивных колес, способных изменять свою жесткость, размер колеса, контактную площадку с поверхностью находят все большее применение. Использование адаптивных колес способствует повышению проходимости робототехнических комплексов; использование тензометрии позволяет создавать автоматизированные системы, принимающие решения об изменении диаметра колеса, для подбора наиболее рационального режима движения исходя из геометрии препятствий и типа поверхности. Автоматизированная система управления адаптивным движителем способна резервировать технологическое зрение при его отказе.
Адаптивные движители (в нашем случаи колесного типа) применяются также в морских роботах, использующихся при разведке и морской добычи углеводородов, картографировании морского дна. Разведка морского дна на сегодняшний день является одной из приоритетных задач в мире. От поиска и добычи полезных ископаемых до прокладки трубопроводов на глубине, на которой не способен работать человек. Сложный ландшафт морского дна и проблема с передачей сигнала, обосновывают необходимость адаптивных движителей, реагирующих на препятствия и изменяющих параметры колеса для преодоления сложных участков без вмешательства человека.
Полученные результаты могут быть использованы в военной промышленности, в частности в научно исследовательских институтах, в сельскохозяйственной робототехники, морской георазведке.
3. Основные особенности и преимущества
-
Возможность изменения клиренса МРК
-
Работа при отказе системы технического зрения
-
Самодиагностика движителя на наличие поломки
-
Автономное определение наличия препятствия, его высоты, возможности преодоления с текущими геометрическими размерами колеса, принятие решения об варьировании диаметра колеса или объезде препятствия.
-
Изменение радиуса поворота, жесткости колеса, пятна контакта с грунтом за счет регулирования диаметра движителя. Как следствие повышение проходимости и устойчивости комплекса в целом.
4. Технические характеристики
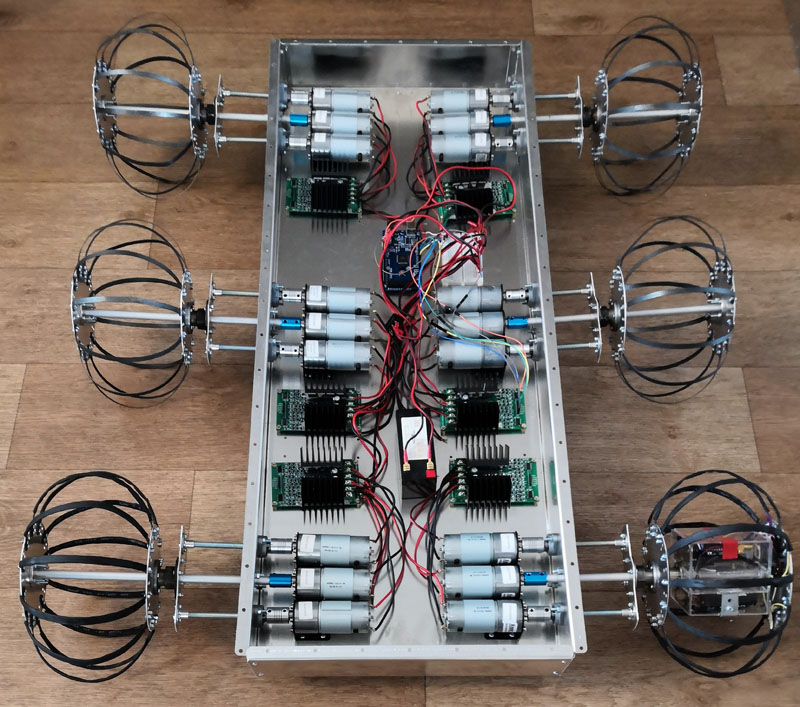
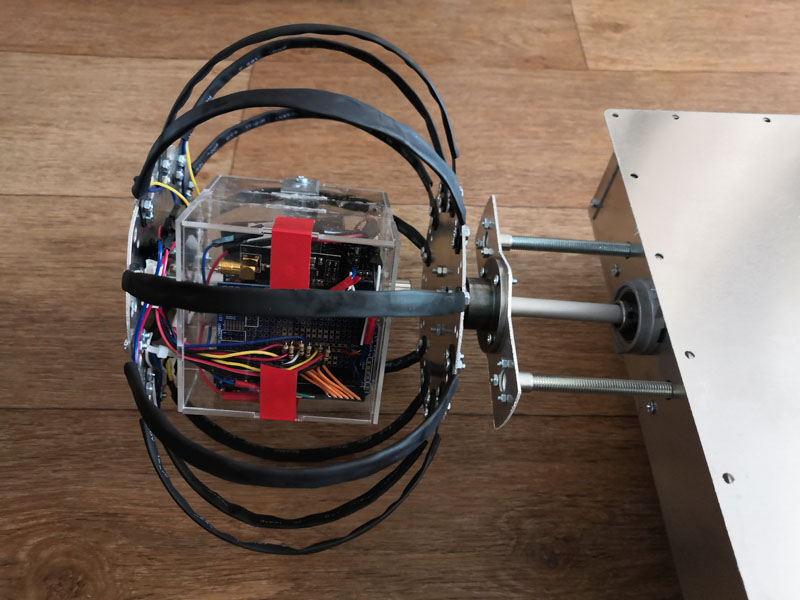
1. Модель адаптивного робототехнического комплекса состоит из 6 движителей. Адаптивные колеса и блок управления состоят из следующих основных компонентов: 2х ступиц, оси, задающей вращение от мотор-редуктора (JGB37-550/6V/26), металлоэластичного каркаса (12 упругих пластин из закаленной стали 65Г), на внутреннюю сторону, которых размещаются резисторы изгиба (FSL-0095-103-ST). ArduinoUno (микроконтроллер ATmega328). Внутренние ступицы, расположенные ближе к корпусу, перемещаются 2-я мотор-редукторами (JGB37-550/6V/26). Сигнал с управляющего микропроцессора подается на драйвер моторов, затем на мотор-редуктор, который в свою очередь посредством зубчатой передачи перемещает ступицы с внутренней части МРК. Уменьшая расстояния между ступицами, эластичные каркас увеличивается в диаметре. Сигнал с внутренней части колеса на силовой блок отправляется посредством радио модуля.
2. Алюминиевый корпус с металлоэластичными образующими из пружинной стали, позволяющие изменять диаметр колеса на 50% (как показал эксперимент диаметр у модели адаптивного колеса способен изменяться от 20 см до 32 см, данную величину можно пропорционально масштабировать). Алюминий был выбран исходя из весовых качеств и антикоррозийных свойств.
3. Габариты робототехнического комплекса (м): 0,9*0,8*0,3 (Д*Ш*В).
4. Диаметр колеса способен варьироваться от 20 до 32 см.
5. Вес: 40 кг.
6. Корпус: алюминий, толщина 1,2 мм
5. Использование в промышленности
Готовится к внедрению.
6. Охранные документы
1. П. м. 180692 Российская Федерация, МПК B60B3/00, B60B15/00, B60B23/12 Адаптивное колесо с раздвижным ободом / Ю.П. Сердобинцев, А.К. Иванюк, В.И. Карлов; ВолгГТУ. - 2018.
2. Свид. о гос. регистрации программы для ЭВМ № 2018662413 от 8 октября 2018 г. Российская Федерация. Программа для принятия решений для изменения ходовых характеристик адаптивных движителей мобильных роботизированных комплексов / Ю.П. Сердобинцев, А.К. Иванюк; ВолгГТУ. - 2018.
3. Свид. о гос. регистрации программы для ЭВМ № 2017611758 от 9 февраля 2017 г. Российская Федерация. Измерение НДС резистором изгиба / Ю.П. Сердобинцев, А.К. Иванюк; ВолгГТУ. - 2017.
7. Контактная информация
Ассистент, аспирант каф. АПП Иванюк Алексей Константинович: ivanyuk_aleksei@mail.ru