- Университет
- Сведения об образовательной организации
- Университет сегодня
- Структура
- Частые вопросы
- Ученый совет
- Информационно-библиотечный центр
- Факультеты и кафедры
- Пресс-центр
- Фирменный стиль (брендбук)
- Персоналии
- Персональные данные
- Медицинские услуги университета
- Ассоциация выпускников ВолгГТУ
- Центр проектной деятельности «POLYGON»
- Точка кипения
- Противодействие терроризму и экстремизму
- Противодействие коррупции
- Образование
- Учебно-методическое управление
- Высшее образование
- Образовательные стандарты
- Второе высшее
- Переподготовка и повышение квалификации
- Довузовская подготовка
- Анкета оценки качества оказания образовательных услуг
- Центр цифровых научно-образовательных проектов и разработок в сфере промышленного искусственного интеллекта
- Наука
- Управление науки и инноваций
- Диссертационные советы
- Отдел аспирантуры и докторантуры
- Научные конференции
- Периодические научные издания
- Национальные проекты России
- Инжиниринговый Центр «Полимерные композиционные материалы и технологии»
- Центр коллективного пользования «Физико-химические методы исследования»
- Центр сертификации композитных материалов ВолгГТУ
- Развитие
- Сотрудничество
- Справочник
- Абитуриенту
- Студенту
- Аспиранту
- Сотруднику
- Партнеру











Главная / Университет / Пресс-центр / ВолгГТУ в СМИ / Университеты РФ: Ученые Волгоградского государственного технического университета представили новую разработку – тросовый робот вертикального перемещения
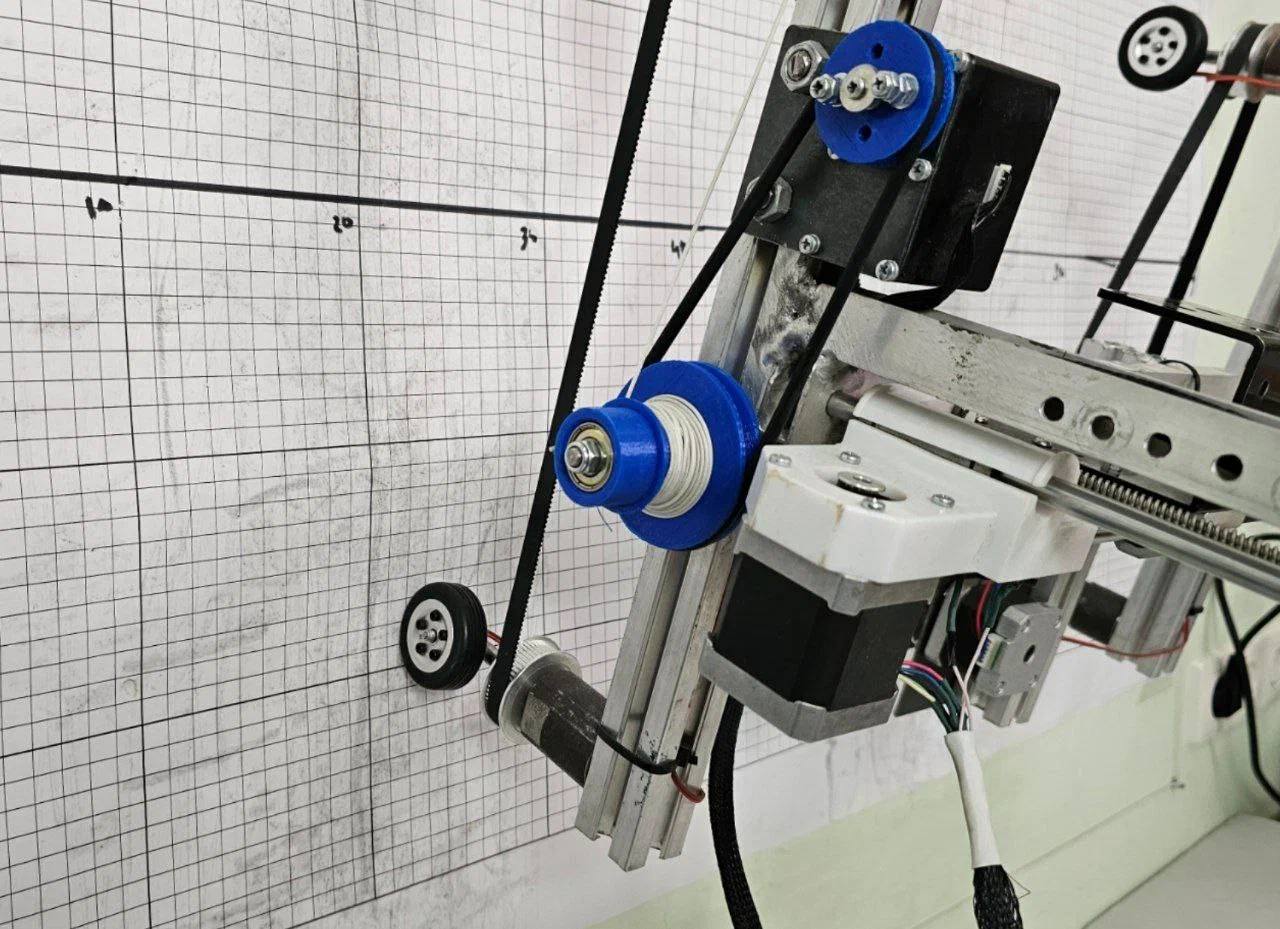
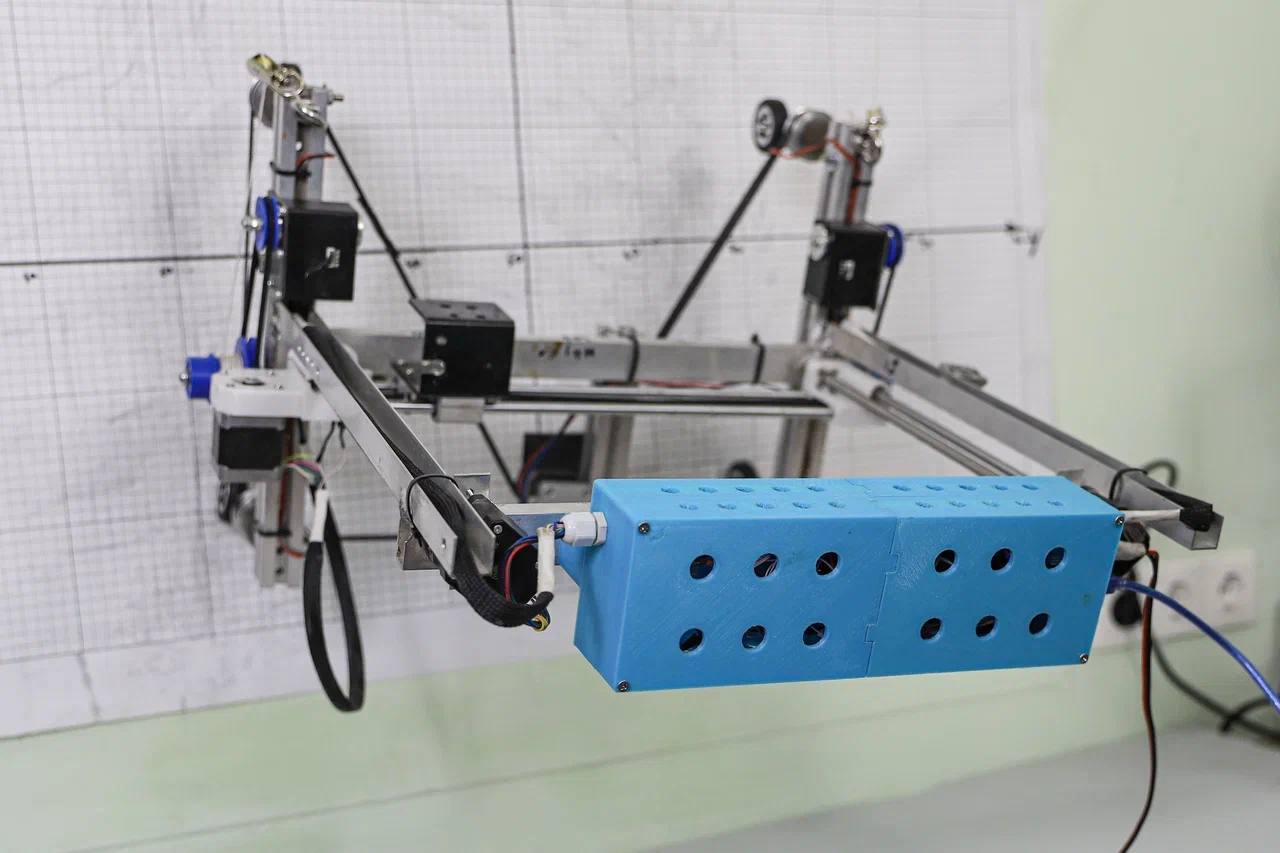
Университеты РФ: Ученые Волгоградского государственного технического университета представили новую разработку – тросовый робот вертикального перемещения

30.09.2024
«Установка предназначена для перемещения по вертикальным поверхностям с возможностью преодоления на них неровностей. Конструкция робота исполнена в небольшом габарите, однако этот робот может быть по подобному принципу построен для значительно больших размеров, чтобы непосредственно на этом роботе мог находиться человек и выполнять некоторых технологические операции», - рассказывает старший преподаватель кафедры «Автоматические установки» Михаил Ефимов.Как уточнили в университете, разработанный робот открывает новые возможности для выполнения задач в труднодоступных местах сооружений и конструкций, а также в зонах с опасной для человека окружающей средой, например для диагностики конструкций на дефекты. Разработка выполнена в рамках программы Минобрнауки России «Приоритет 2030».
Рубрики

